Calibration_check 실행
bash calibration_check_start.sh
p: LiDAR 데이터가 겹쳐보이는 기능 on / off
p 키를 누르며 LiDAR 데이터와 camera 데이터가 겹치는지 정성적으로 확인
o, l: 가까이 보이는 물체와 멀리 보이는 물체에 대해 색상으로 시점이 단계적으로 조절
- 근거리와 원거리에 대해 각각 조절한 후 1번 과정 반복하며 정성적으로 확인
데이터 저장
[날짜]_Calibration데이터취득
├── 1_rosbag
│ ├── Calibration_검증용데이터
│ └── Calibration_parameter_취득용데이터
├── 2_Calibration_param
└── 3_evaluation
- 날짜는 년도-월-일로 구성
[날짜]_Calibration데이터취득/1_rosbag/Calibration_검증용데이터: 검증용 데이터 저장[날짜]_Calibration데이터취득/1_rosbag/Calibration_parameter_취득용데이터: 파라미터 취득용 데이터 저장[날짜]_Calibration데이터취득/2_Calibration_param
calibration_tool/src/autoware_camera_lidar_calibrator/launch/pubtf.launchcalibration_tool/src/extract_RT/param/lidar_camera_calibration.yamlcalibration_tool/src/calibration_check/param/RT_lidar_camera_calibration.yaml
[날짜]_Calibration데이터취득/3_evaluation
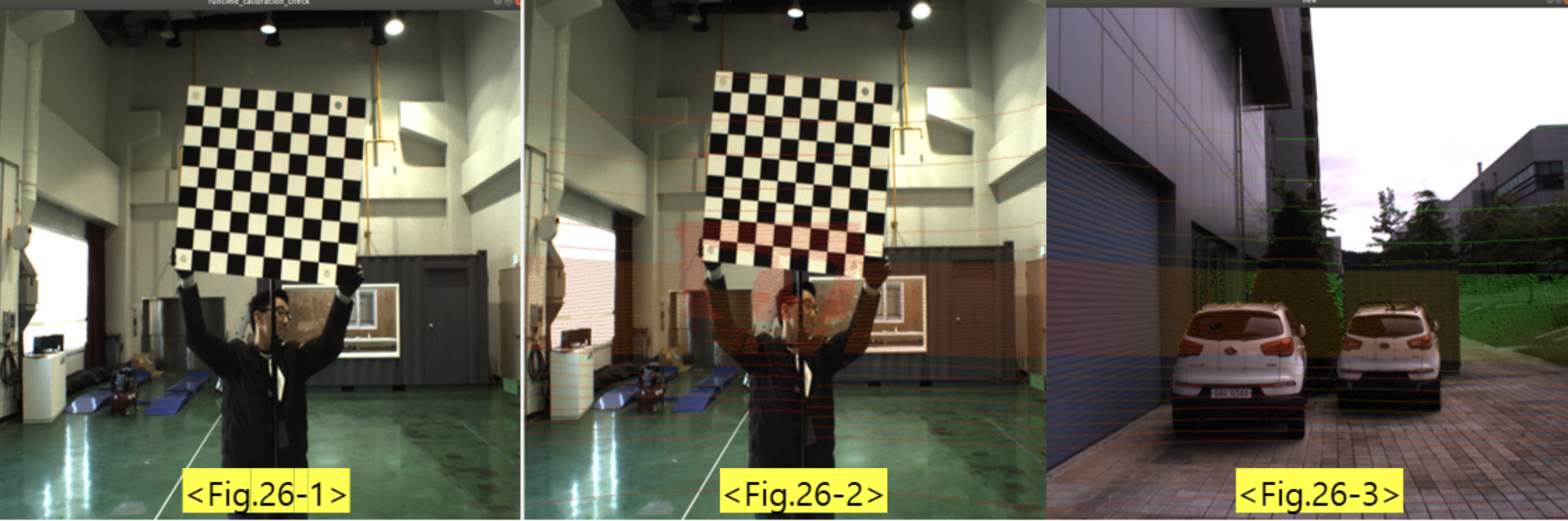
- <Fig.26>과 같이 Calibration_check의 실행 결과로 생성된 화면을 캡쳐하여 보관
- 파일명은 실행시킨 bag 파일의 파일명과 동일하게 설정
(bag 파일 하나당 LiDAR 데이터가 동시에 존재하는 화면, LiDAR 데이터가 존재하지 않는 화면) 모두 캡쳐해서 저장