역할
- LiDAR segmentation 모델 실행 부분
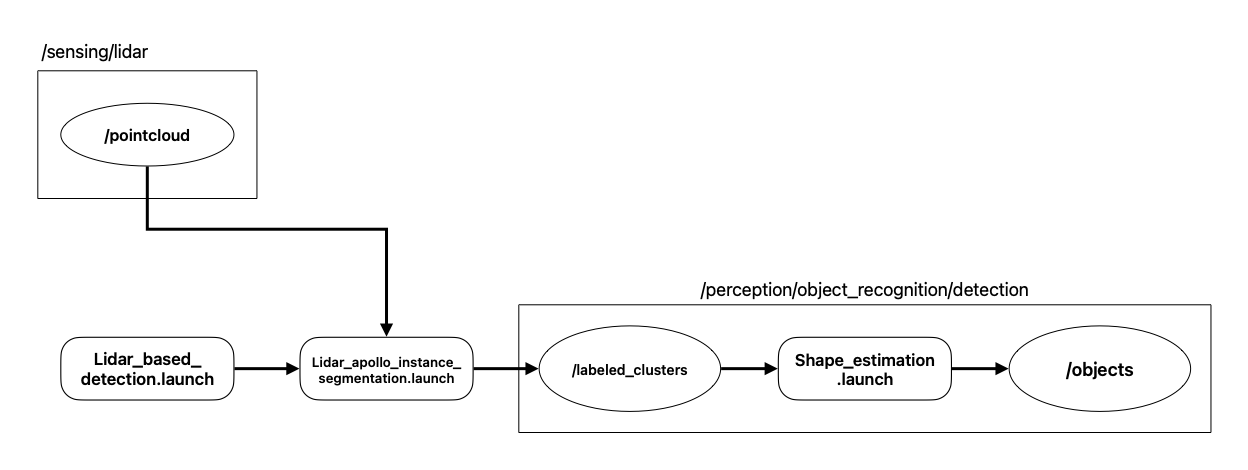
Architecture
변경 및 개선 사항
/launch/lidar_apollo_instance_segmentation.launch
- 변경한 토픽명 적용
- Original
<remap from="~input/pointcloud" to="/sensing/lidar/top/rectified/pointcloud"/> - Ours
<remap from="~input/pointcloud" to="/sensing/lidar/pointcloud"/>
- Original
/src/cluster2d.cpp
- NaN filtering 추가 적용
- Original
None - Ours
Output msg에서
INF,NaN값 필터링 추가
- Original