Contents
역할
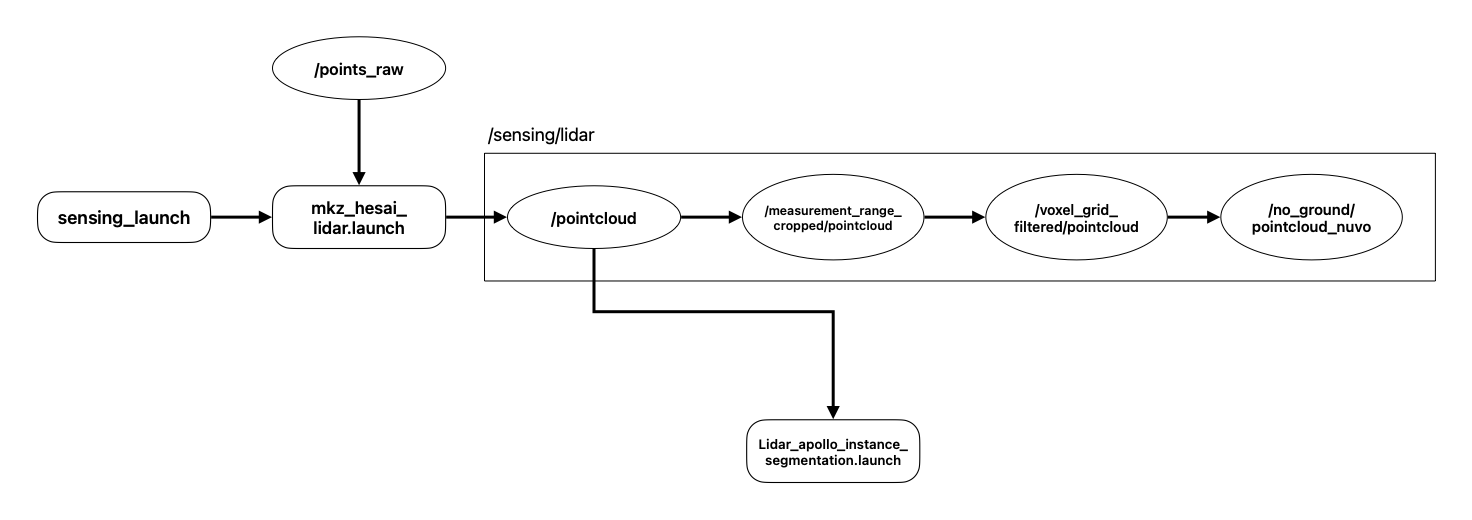
- LiDAR 포인트에 대해서 전처리하는 부분
Architecture
변경 및 개선 사항
- LiDAR top only use
- Original Top, left, right concat filter
- Ours 삭제
- 자차에 찍히는 포인트 제거
- Original
None - Ours
Crop box filter self 추가
<param name="min_x" value="-2.3300" /> <param name="max_x" value="2.540" /> <param name="min_y" value="-0.915" /> <param name="max_y" value="0.915" /> <param name="~min_z" value="-1.8" /> <param name="~max_z" value="0.2" /> <param name="input_frame" value="velodyne_top" /> <param name="output_frame" value="base_link" />
- Original
- Crop box filter의 파라미터 및 토픽 명 변경
- Original
<remap from="~input" to="concatenated/pointcloud" /> <remap from="~output" to="mesurement_range_cropped/pointcloud" /> <param name="min_x" value="-50.0" /> <param name="max_x" value="100.0" /> <param name="min_y" value="-50.0" /> <param name="max_y" value="50.0" /> <remap from="~min_z" to="/vehicle_info/min_height_offset" /> <remap from="~max_z" to="/vehicle_info/max_height_offset" />- Ours
<remap from="~input" to="/sensing/lidar/pointcloud" /> <remap from="~output" to="mesurement_range_cropped/pointcloud" /> <param name="min_x" value="-25.0" /> <param name="max_x" value="150.0" /> <param name="min_y" value="-25.0" /> <param name="max_y" value="25.0" /> <param name="~min_z" value="-1.8" /> <param name="~max_z" value="1.8" />
- Ours
- Original
- Planning 파트에서 포인트를 활용할 때 부하를 줄이기 위해 다운샘플링 적용
- Originals
None - Ours
Down sampling 추가
<!-- down sampling--> <node pkg="nodelet" type="nodelet" name="voxel_grid_filter" args="load pointcloud_preprocessor/voxel_grid_downsample_filter_nodelet $(arg manager)" output="screen"> <remap from="~input" to="mesurement_range_cropped/pointcloud" /> <remap from="~output" to="voxel_grid_filtered/pointcloud" /> <rosparam> filter_field_name: z filter_limit_min: 0.1 filter_limit_max: 2.5 filter_limit_negative: False leaf_size: 0.03 input_frame: base_link output_frame: base_link </rosparam> </node>
- Originals
- KIAPI PointCloud Ground Filter
- Originals
None - Ours
<!-- KIAPI PointCloud Ground Filter --> <node pkg="nodelet" type="nodelet" name="ray_ground_filter" args="load pointcloud_preprocessor/ray_ground_filter_nodelet $(arg manager) " output="screen"> <remap from="~input" to="voxel_grid_filtered/pointcloud" /> <remap from="~output" to="no_ground/pointcloud_nuvo" /> <!--<remap from="~removal_outlier" to="no_ground/statistical_cloud" /> --> <!--<remap from="~removal_ground" to="no_ground/ground_cloud" /> --> <param name="general_max_slope" value="15.0" /> <param name="local_max_slope" value="25.0" /> <param name="min_height_threshold" value="0.2" /> </node>
- Originals