☑ Check Box
- Docker 새로 한게 파서 구동해보기
- Matlab calibration paramere 와 OpenCV parameter 비교하고 각 parameter 를 사용한 결과 비교하기
- PCD downsampling 및 포인트 크기 조절 등 방법 조사하고 적용해보기
- 데이터 몇 개 더 찍어서 결과 확인하기
- 이발 예약
- task 휴대폰 요금 변경 ⏳ 2024-07-09
- task 월세 자동이체 ✅ 2024-07-08
- task 장학금 알아보기
- task 이발 예약 #03 📅 2024-07-06 ✅ 2024-07-08
- [ ]
🧠 Idea Note
📥 Related Works
Docker 설치
-
Docker
- Image:
ubuntu:20.04 - Run
docker run -it --privileged --gpus 'all,"capabilities=compute,utility,graphics"' -e DISPLAY=unix$DISPLAY -e QT_X11_NO_MITSHM=1 -v /tmp/.X11-unix:/tmp/.X11-unix:rw -v /etc/localtime:/etc/localtime:ro -e TZ=Asia/Seoul -v /dev:/dev -v ~/workspace/dataset:/workspace/dataset -w /workspace --restart always --name stereo2pcd python:3.10.14-bullseye
- Image:
-
VSCode 가상환경 코드 디버깅 수행
- 실행하고자 하는 코드가 있는 프로젝트 폴더에
launch.json과settings.json파일 생성
- 실행하고자 하는 코드가 있는 프로젝트 폴더에
{
"version": "0.2.0",
"configurations": [
{
"name": "Python: Current File",
"type": "debugpy",
"request": "launch",
"args": ["--config","test.yaml",
"--input","check.txt",
], // argument 집어넣어서 실행할 경우
"console": "integratedTerminal"
}
]
}{
"python.testing.unittestArgs": [
"-v",
"-s",
".",
"-p",
"test_*.py"
],
"python.testing.pytestEnabled": false,
"python.testing.nosetestsEnabled": false,
"python.testing.unittestEnabled": true,
"python.pythonPath": "/workspace/project/calibration/.venv/bin/python3.10"
}- Open3D 를 실행할 때 해당 문제 발생 시
[Open3D WARNING] GLFW Error: GLX: Failed to create context: BadMatch (invalid parameter attributes)
[Open3D WARNING] Failed to create window
[Open3D WARNING] [DrawGeometries] Failed creating OpenGL window.- Docker container 실행 시 다음 옵션 추가
--gpus 'all,"capabilities=compute,utility,graphics"'
-v /tmp/.X11-unix:/tmp/.X11-unix -e DISPLAY=unix$DISPLAYCalibration parameter 비교
Matlab vs Opencv
- K1
| 2658.03 | 0 | 2776.31 |
|---|---|---|
| 0 | 2650.74 | 2443.98 |
| 0 | 0 | 1 |
| 2652.5 | 0 | 2774.2 |
| 0 | 2643.5 | 2444.6 |
| 0 | 0 | 1 |
- K2
| 2649.23 | 0 | 2796.48 |
|---|---|---|
| 0 | 2645.80 | 2435.20 |
| 0 | 0 | 1 |
| 2648.8 | 0 | 2801.8 |
| 0 | 2640.6 | 2410.9 |
| 0 | 0 | 1 |
- dist1
| 0.00201 | -0.01563 | 0 | 0 | 0 |
|---|---|---|---|---|
| 0.0412 | -0.1592 | 0.0004 | -0.0018 | 0.1583 |
- dist2
| 0.00920 | -0.03124 | 0 | 0 | 0 |
|---|---|---|---|---|
| 0.0408 | -0.1907 | -0.0041 | 0.0015 | 0.2106 |
- Rotation
| 0.9996 | -0.0261 | -0.0053 |
|---|---|---|
| 0.0260 | 0.9995 | -0.0199 |
| 0.0058 | 0.0198 | 0.9998 |
| 0.9996 | -0.0252 | -0.0080 |
| 0.0251 | 0.9996 | -0.0104 |
| 0.0082 | 0.0102 | 0.9999 |
- Translation
| -243.77 | -0.0851 | -2.0257 |
|---|---|---|
| -6.0966 | 0.0037 | -0.0045 |
- Q
| 1 | 0 | 0 | -2776.3 |
|---|---|---|---|
| 0 | 1 | 0 | -2444.0 |
| 0 | 0 | 0 | 2658.0 |
| 0 | 0 | -0.0041 | -0.0830 |
| 1 | 0 | 0 | -2770.0 |
| 0 | 1 | 0 | -2435.2 |
| 0 | 0 | 0 | 2642.1 |
| 0 | 0 | 0.1640 | 0 |
- test1: Matlab 에서 추출한 파라미터로 Q 계산 (cv2.stereoRectify) 후 수행
- test2: Matlab 에서 추출한 파라미터로 Q 계산 (수동) 후 수행
- Q 를 구하는 과정에서 243e+03 인가? 243 인가?
- test2-1 : 243, test2-2: 243e+03
현재 OpenCV Stereo calibration tool 을 사용하면 Dist 와 Translation 이 이상하게 나오기 때문에 해당 문제는 추후 해결하기로 하고, 일단 Matlab 에서 계산한 Parameter 를 사용하여 테스트 진행
-
test3: 내 외부 파라미터 모두 OpenCV 에서 계산한 것으로 수행
- test3-2: Q 는 수동으로 계산
- test3-3: Translation 제외 나머지 파라미터 OpenCV (Q 자동 계산)
- test3-4: Translation 제외 나머지 파라미터 OpenCV (Q 수동 계산)
-
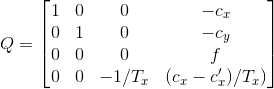
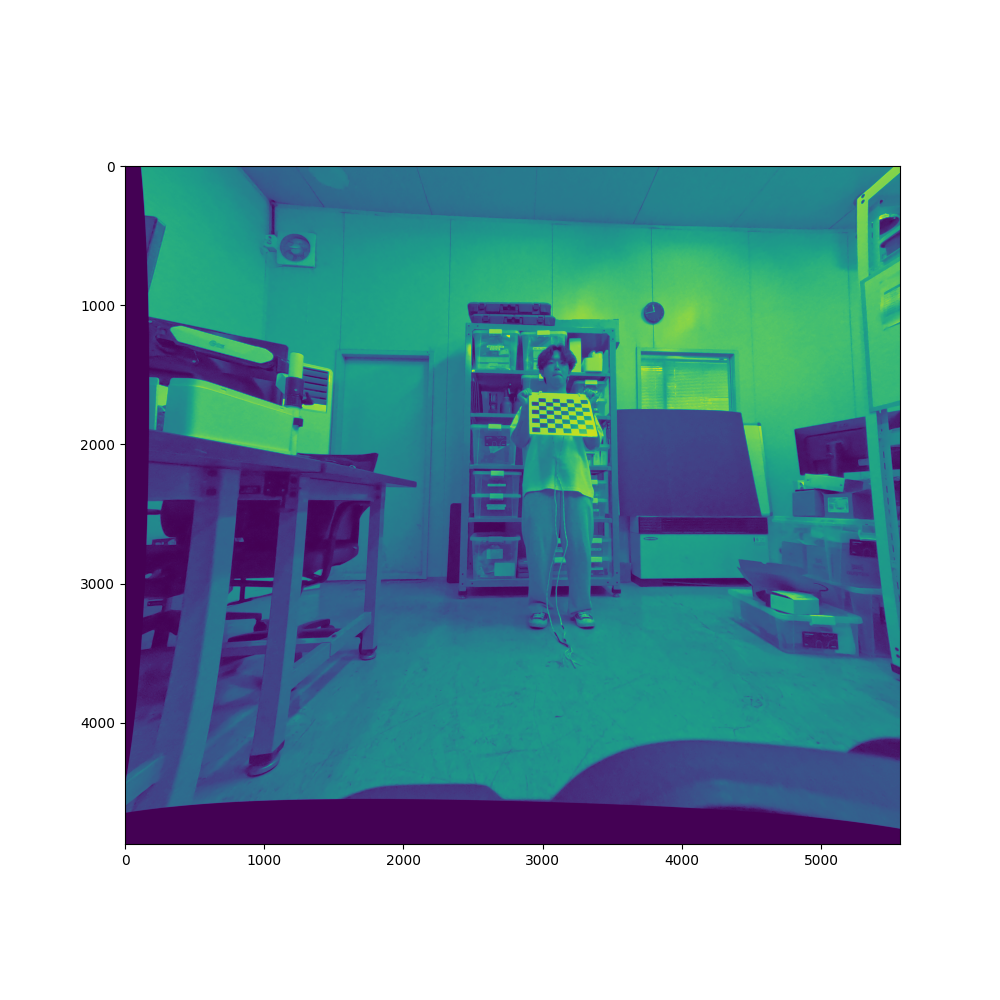
Undistorted images
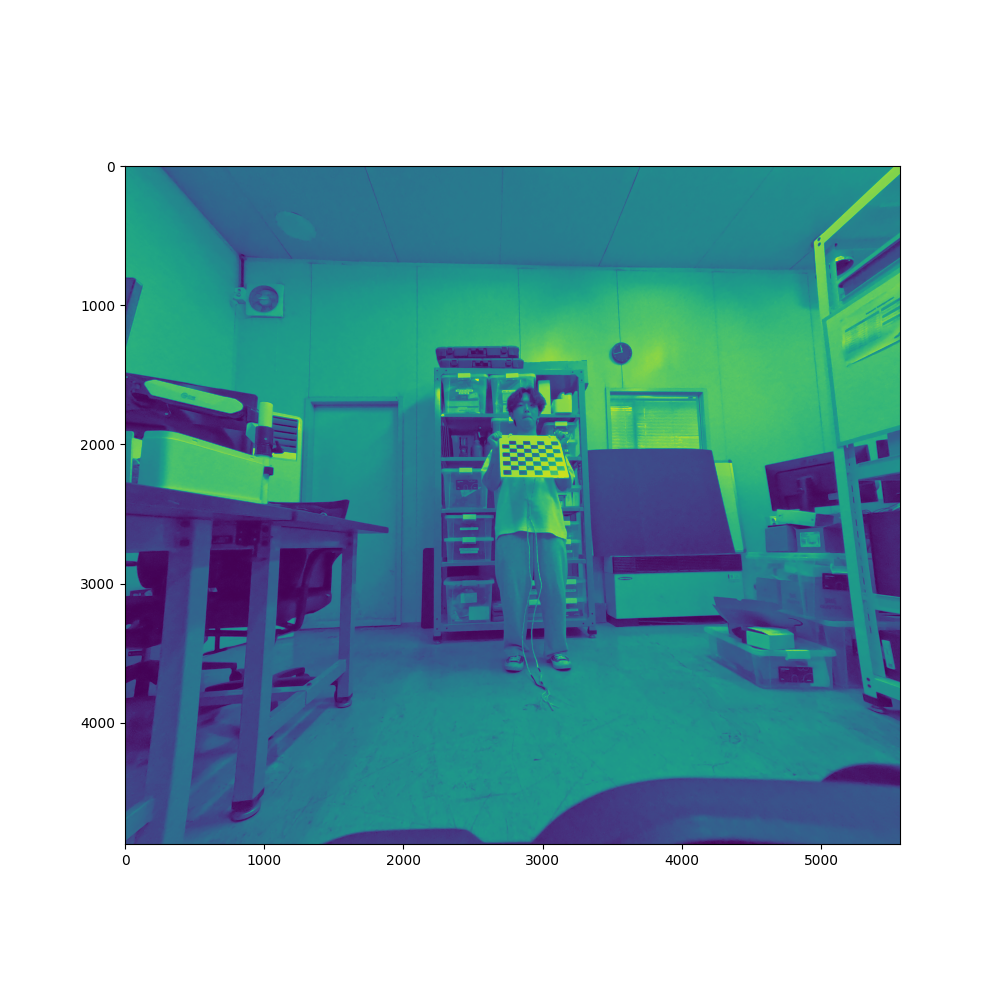
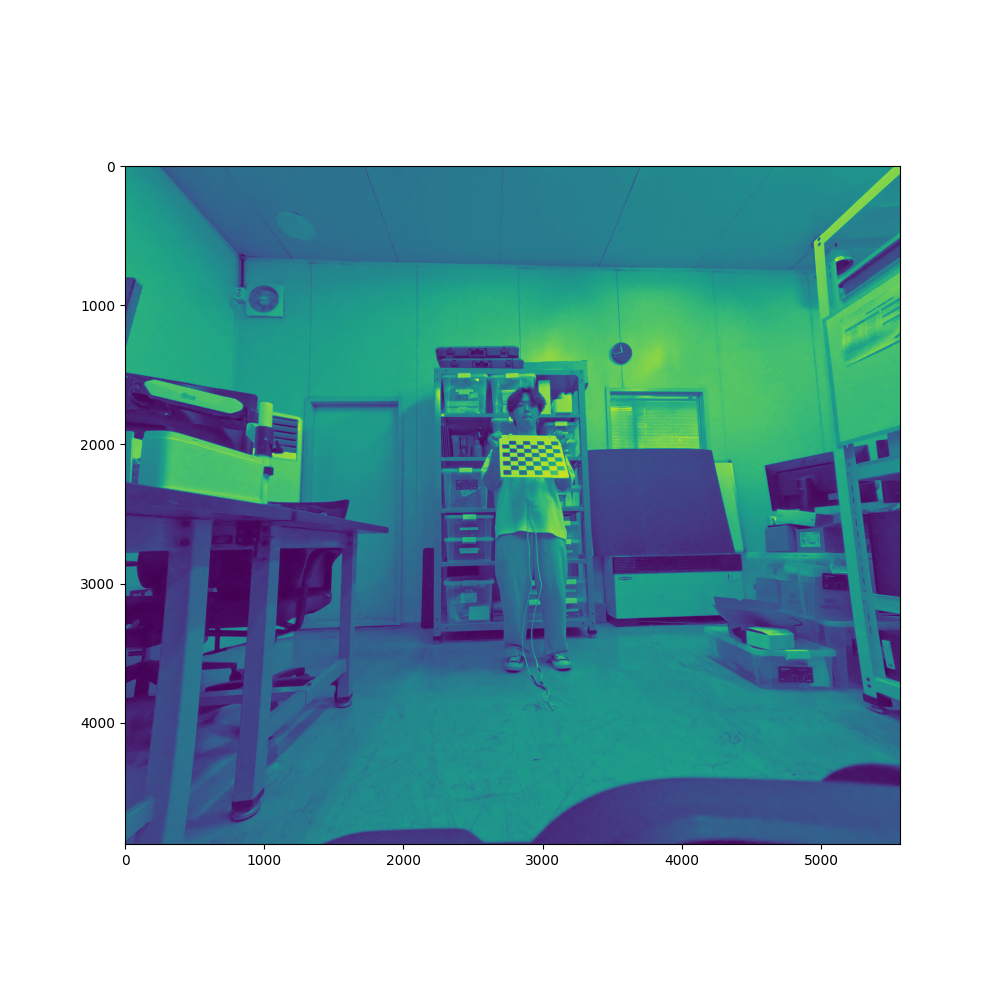
-
Rectified images
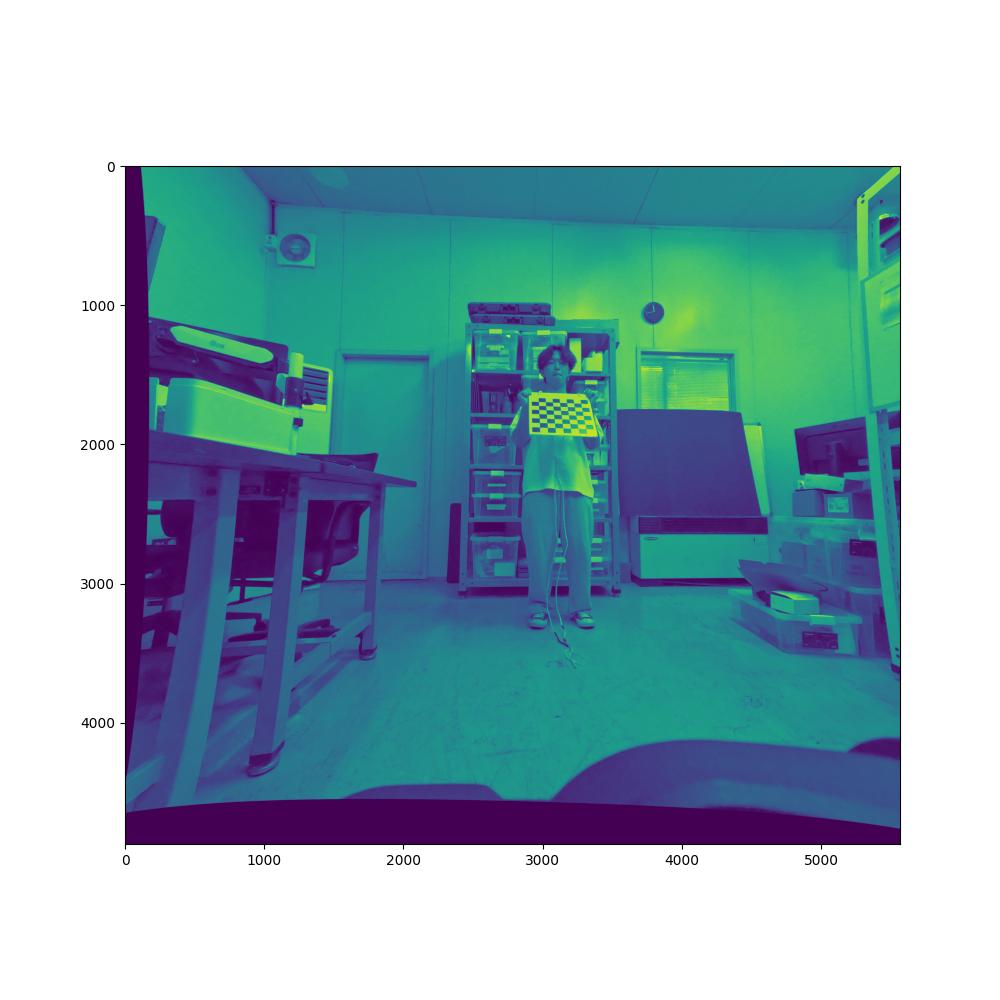
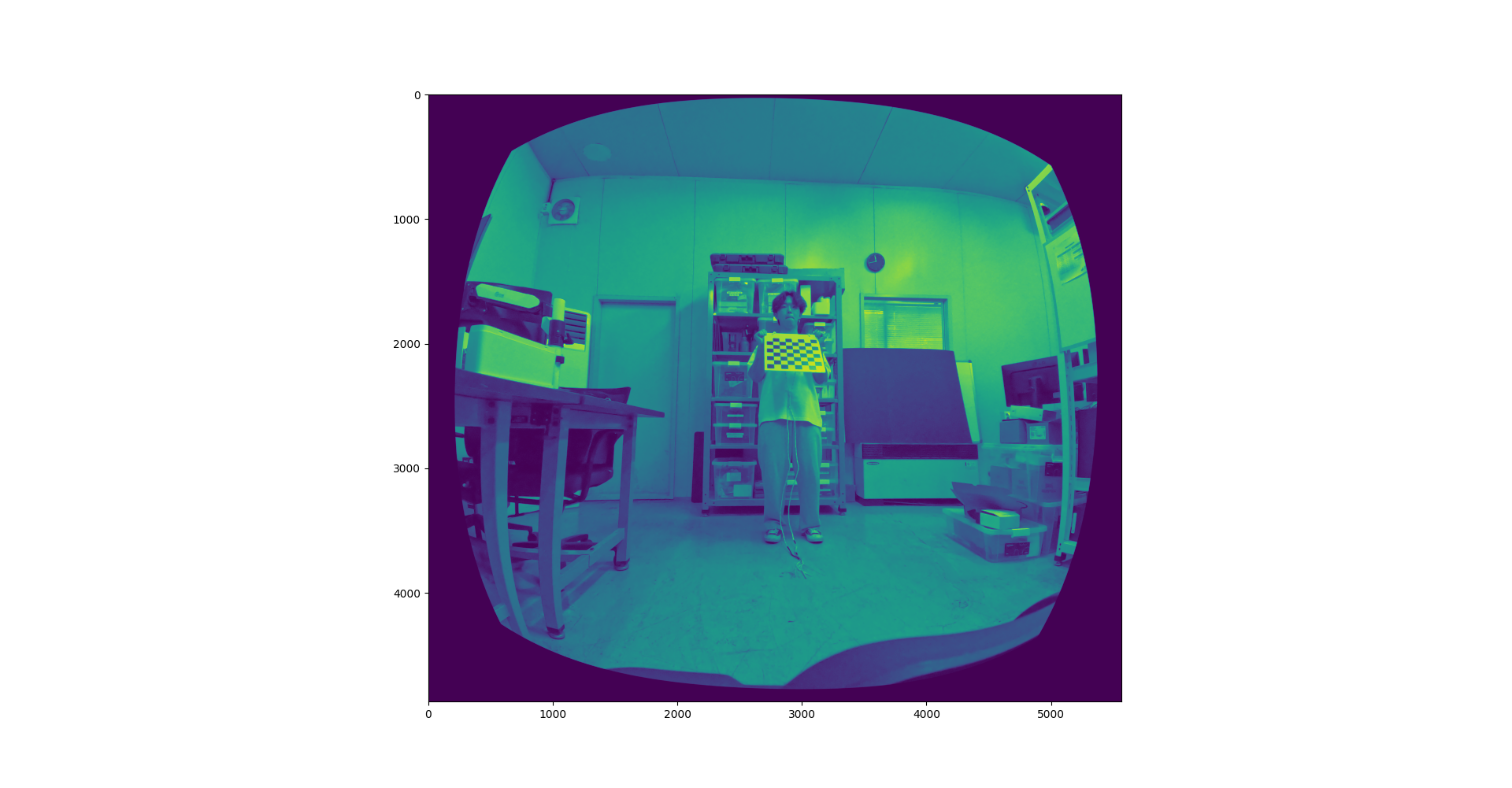
-
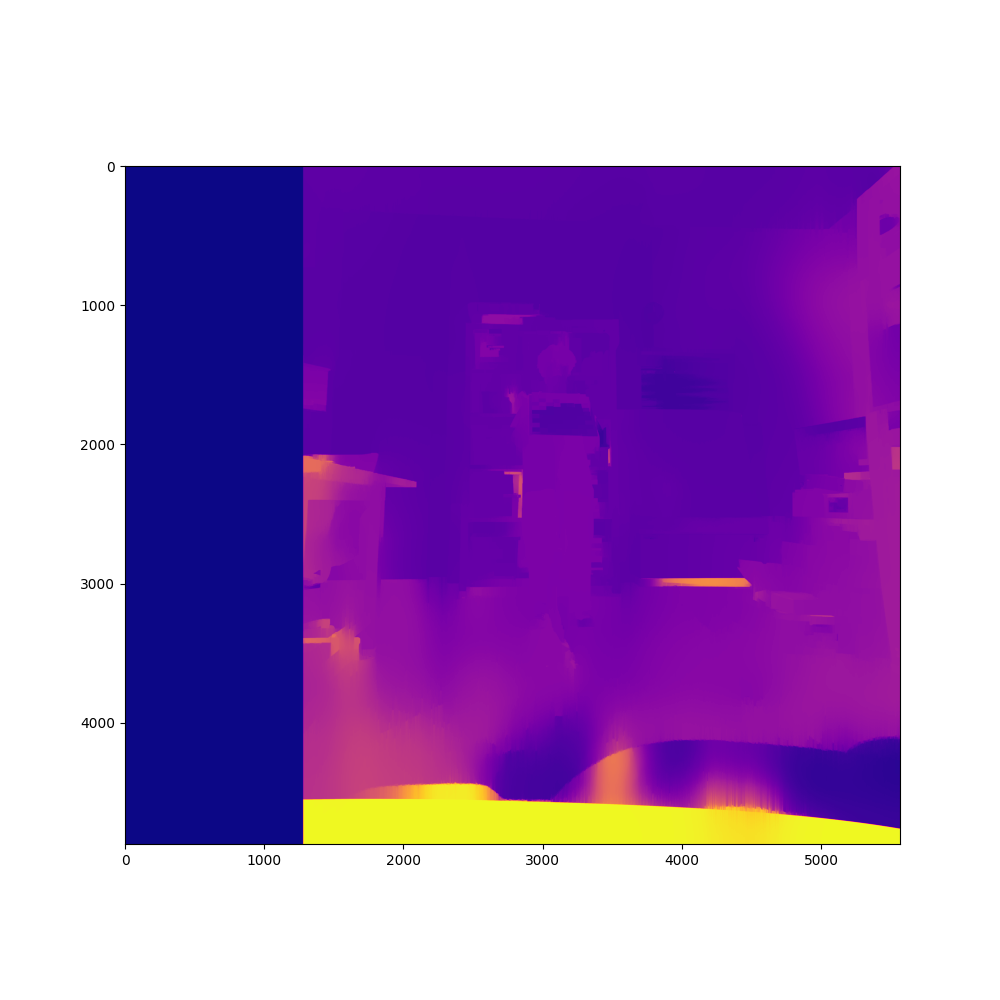
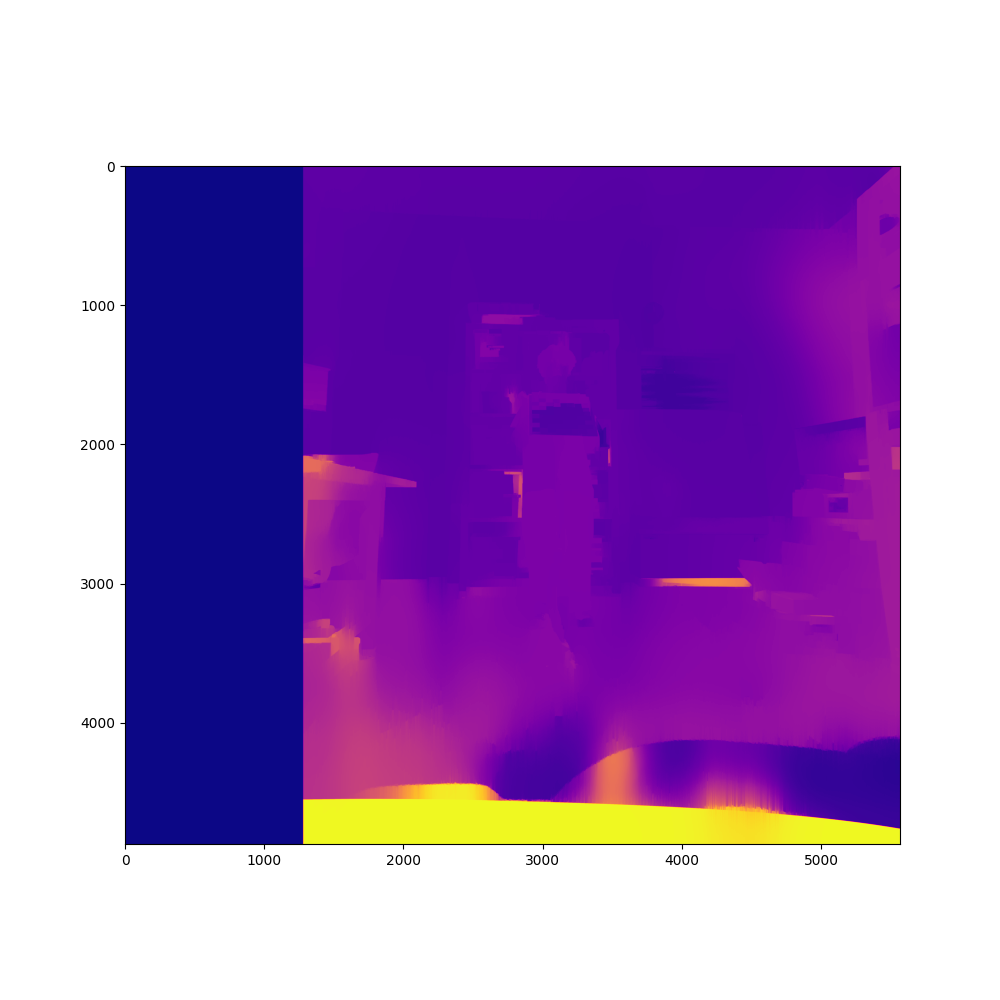
Disparity map
Result
- test1
- 바닥과 사물 등의 거리가 어느정도 경향성을 보이나 좌우 반전되어 있음
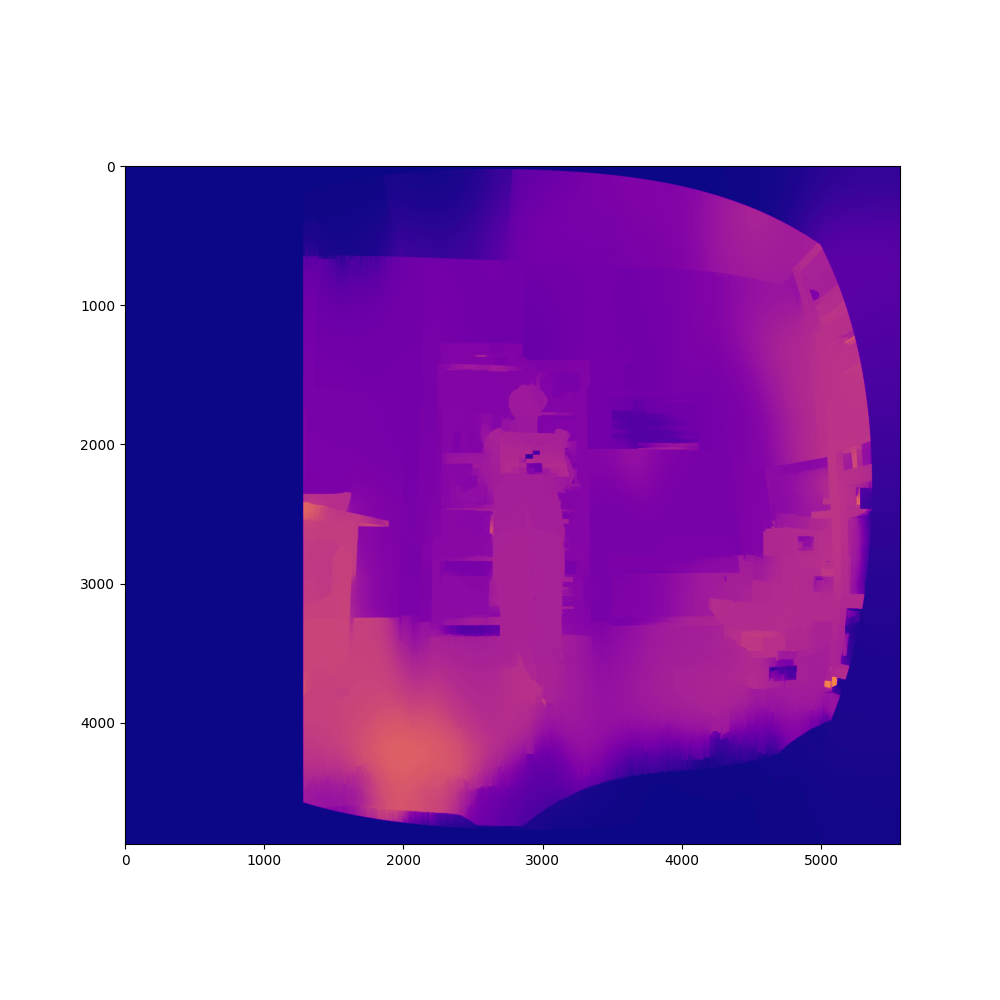
- test2-1
- 좌우 방향은 맞게 나왔으나 test1 에 비해 경향성이 적게 보임
-
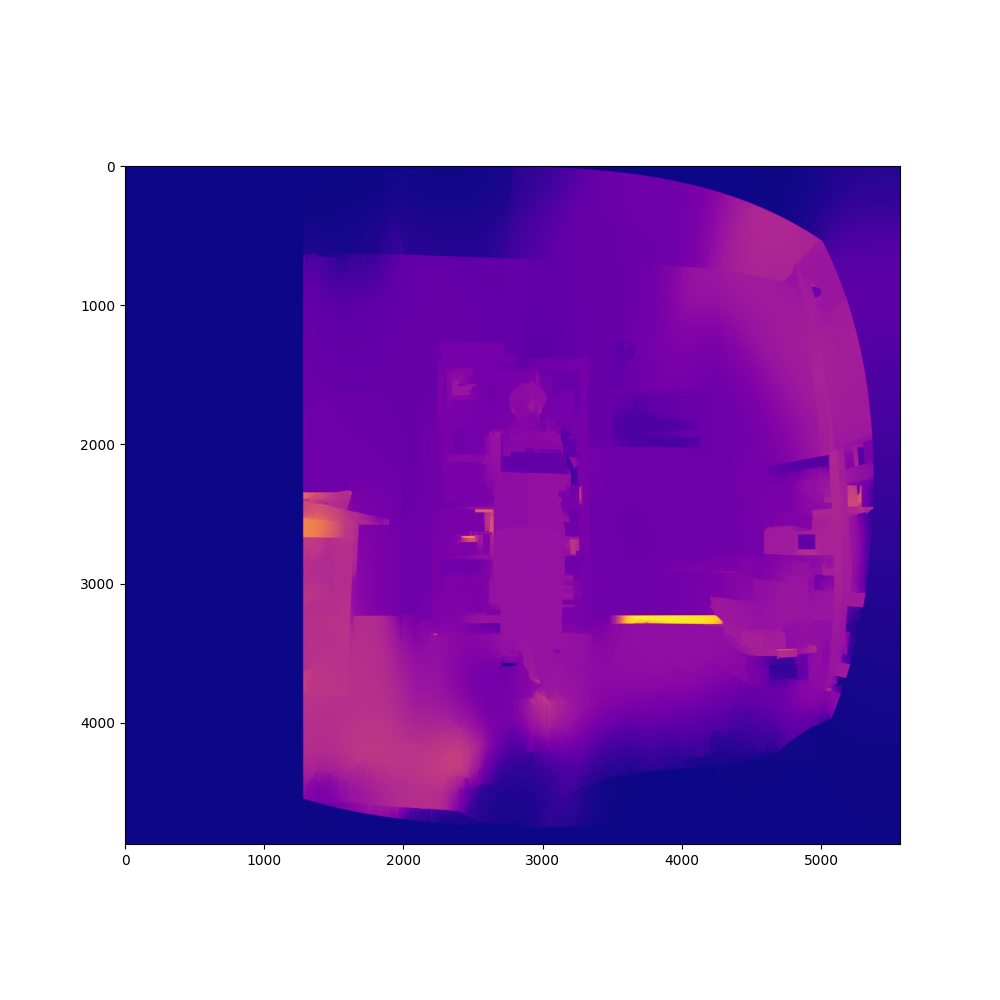
test2-2
- test2-1 과 큰 차이 없음
-
test3
- Q 를 계산하는 과정에서 오류가 있는 것으로 보임
-
test3-2
- 천장과 바닥에서 거의 확실하게 포인트가 생성되며, 단 물체의 경우는 포인트가 제대로 생성되지 않음
- test2 와 비교하면 dist 와 translation 만 바꼈는 데 큰 변화 있음
- 즉, dist 는 opencv 에서 계산 한 것이 정확한듯 보이고, translation 의 경우 다시 해봐야 할 것 같음
- Q 는 왜인지 잘 모르겠음
- *아마 OpenCV 에서 계산한 Translation 이 심하게 이상한 값이 나와서 그런 것으로 보임! *
-
test3-3
- *아마 OpenCV 에서 계산한 Translation 이 심하게 이상한 값이 나와서 그런 것으로 보임! * → 이거 아닌듯 함
- Q 를 출력해본 결과 값은 거의 동일하나 Baseline 부분의 부호가 반대로 되어있었음.
- Matlab 과 OpenCV 의 Translation 방향이 반대로 되어있는 듯함
- Matlab 의 translation 값 부호를 바꾸고 한 결과 Q 는 얼추 정확하게 나왔으나 포인트는 여전히 이상하게 나옴
- test3-4
- test3-3 과의 차이점이라고 하면 Q 밖에 없다.
- 하지만 Q 의 경우 3-3 테스트의 추가 실험에서 알 수 있듯이 Translation 의 부호를 변경하면 Q가 수동 계산과 동일해지는데 포인트는 이상하게 나온다
- 여기서 Translation 은 Rectify 에 사용되고 Rectified image 는 Disparity 맵을 만드는데 사용된다.
- 즉, Translation 의 부호를 바꾼 탓에 Disparity map 의 계산이 틀어진 것으로 보인다.
- 잠시만, 그렇다면 Q 를 수동계산하는 식에 -를 빼면 되는 것 아닌가?
- 그렇게 되면 수동 값과 자동 값 모드 동일한 부호를 갖게 된다.
- 이것으로 해결된다면 test3-3 의 문제는 Translation 의 부호가 반대가 되어 Disparity map 생성에 문제가 발생한 것
- test3-5
- Q 수동 계산 식의 부호를 수정한 뒤 자동 및 수동으로 진행
- 먼저 첫번째 수동의 경우 좌우 반전된 것을 확인할 수 있음
- 지금 Calibration 자체의 부호가 이상하게 된것 같은데 Matlab 이나 OpenCV 에서 Calibration 을 할 때 원점의 위치가 좌측 상단에 위치한 것이 원인인듯 함
- 찾아보니 체커보드의 넓이와 높이가 짝수, 홀수가 되어야 한다고 하는데 실험에는 7,7 크기였기 때문에 문제가 발생하지 않았나 추측해봄
- 자동의 경우 또 포인트가 몇개 찍히지 않음
- 수동과 차이라고는 Q 4행 4열 값이 0.08 정도 차이가 나는 것인데 왜 이렇게 큰 차이가 나는지 알 수 없음
Checkerboard 수정
- OpenCV
[[2.64854552e+03 0.00000000e+00 2.76895348e+03]
[0.00000000e+00 2.64306178e+03 2.45610393e+03]
[0.00000000e+00 0.00000000e+00 1.00000000e+00]]
[[2.64517191e+03 0.00000000e+00 2.81201085e+03]
[0.00000000e+00 2.63371976e+03 2.40949872e+03]
[0.00000000e+00 0.00000000e+00 1.00000000e+00]]
[[ 0.03319256 -0.14649957 0.00204108 -0.00027259 0.16413916]]
[[ 0.03773088 -0.18673464 -0.00340553 0.00486367 0.24332452]]
[[ 0.99953074 -0.02829152 -0.01174298]
[ 0.02818063 0.99955767 -0.00950361]
[ 0.01200666 0.00916823 0.99988589]]
[[-24.69688786]
[ 0.3306053 ]
[ -0.59528897]]
Q 자동
[[ 1.00000000e+00 0.00000000e+00 0.00000000e+00 -2.72265218e+03]
[ 0.00000000e+00 1.00000000e+00 0.00000000e+00 -2.43481873e+03]
[ 0.00000000e+00 0.00000000e+00 0.00000000e+00 2.63839077e+03]
[ 0.00000000e+00 0.00000000e+00 4.04755500e-02 -0.00000000e+00]]
Q 수동