Contents
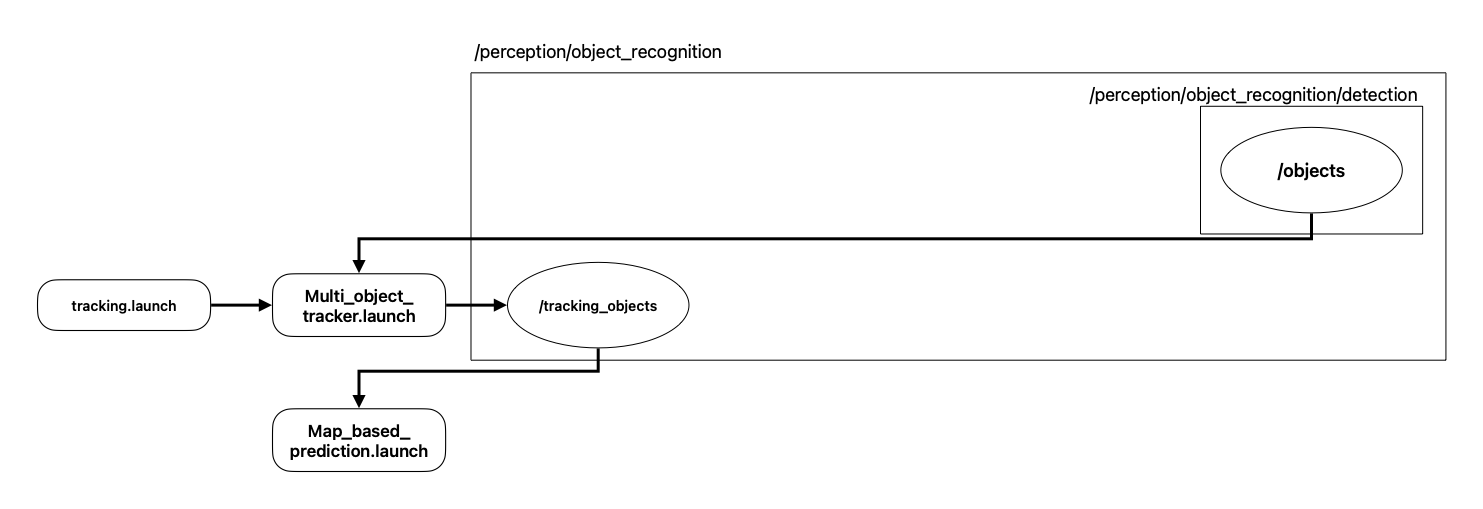
Architecture
변경 및 개선 사항
/config/data_association_matrix.yaml
- Max_dist_matrix, max_area_matrix 파라미터 수정
- Original
max_dist_matrix: #UNKNOWN, CAR, TRUCK, BUS, BICYCLE, MOTORBIKE, PEDESTRIAN, ANIMAL [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, #UNKNOWN 4.0, 2.0, 5.0, 5.0, 1.0, 1.0, 1.0, 1.0, #CAR 4.0, 2.0, 5.0, 5.0, 1.0, 1.0, 1.0, 1.0, #TRUCK 4.0, 2.0, 5.0, 5.0, 1.0, 1.0, 1.0, 1.0, #BUS 3.0, 1.0, 1.0, 1.0, 3.0, 3.0, 2.0, 1.0, #BICYCLE 3.0, 1.0, 1.0, 1.0, 3.0, 3.0, 2.0, 1.0, #MOTORBIKE 2.0, 1.0, 1.0, 1.0, 3.0, 3.0, 2.0, 1.0, #PEDESTRIAN 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0] #ANIMAL max_area_matrix: #UNKNOWN, CAR, TRUCK, BUS, BICYCLE, MOTORBIKE, PEDESTRIAN, ANIMAL [10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, #UNKNOWN 12.10, 12.10, 19.75, 32.40, 10000.00, 10000.00, 10000.00, 10000.00, #CAR 19.75, 12.10, 19.75, 32.40, 10000.00, 10000.00, 10000.00, 10000.00, #TRUCK 32.40, 12.10, 19.75, 32.40, 10000.00, 10000.00, 10000.00, 10000.00, #BUS 2.50, 10000.00, 10000.00, 10000.00, 1.50, 1.50, 1.00, 10000.00, #BICYCLE 3.00, 10000.00, 10000.00, 10000.00, 1.50, 1.50, 1.00, 10000.00, #MOTORBIKE 2.00, 10000.00, 10000.00, 10000.00, 1.50, 1.50, 1.00, 10000.00, #PEDESTRIAN 2.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00] #ANIMAL - Ours
max_dist_matrix: #UNKNOWN, CAR, TRUCK, BUS, BICYCLE, MOTORBIKE, PEDESTRIAN, ANIMAL [1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, #UNKNOWN 4.0, 2.0, 7.0, 7.0, 1.0, 1.0, 1.0, 1.0, #CAR 4.0, 2.0, 7.0, 7.0, 1.0, 1.0, 1.0, 1.0, #TRUCK 4.0, 2.0, 7.0, 7.0, 1.0, 1.0, 1.0, 1.0, #BUS 3.0, 1.0, 1.0, 1.0, 3.0, 3.0, 2.0, 1.0, #BICYCLE 3.0, 1.0, 1.0, 1.0, 3.0, 3.0, 2.0, 1.0, #MOTORBIKE 2.0, 1.0, 1.0, 1.0, 3.0, 3.0, 2.0, 1.0, #PEDESTRIAN 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0, 1.0] #ANIMAL max_area_matrix: #UNKNOWN, CAR, TRUCK, BUS, BICYCLE, MOTORBIKE, PEDESTRIAN, ANIMAL [10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, #UNKNOWN 13.80, 13.80, 53.55, 53.55, 10000.00, 10000.00, 10000.00, 10000.00, #CAR 53.55, 13.80, 53.55, 53.55, 10000.00, 10000.00, 10000.00, 10000.00, #TRUCK 53.55, 13.80, 53.55, 53.55, 10000.00, 10000.00, 10000.00, 10000.00, #BUS 3.00, 10000.00, 10000.00, 10000.00, 3.00, 3.00, 1.00, 10000.00, #BICYCLE 3.00, 10000.00, 10000.00, 10000.00, 3.00, 3.00, 1.00, 10000.00, #MOTORBIKE 3.00, 10000.00, 10000.00, 10000.00, 3.00, 3.00, 1.00, 10000.00, #PEDESTRIAN 3.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00, 10000.00] #ANIMAL
- Original
/src/tracker/model/bicycle_tracker.cpp
- 파라미터 변경
- Original
max_wz_ = autoware_utils::deg2rad(30); // [rad/s] - Ours
max_wz_ = autoware_utils::deg2rad(60); // [rad/s]
- Original
/src/tracker/model/pedestrian_tracker.cpp
- 파라미터 변경
- Original
max_vx_ = autoware_utils::kmph2mps(10); // [m/s] - Ours
max_vx_ = autoware_utils::kmph2mps(20); // [m/s]
- Original
/src/node.cpp
- NaN filtering 추가 적용
- Original
None - Ours Output msg에서 INF, NaN값 필터링 추가
- Original