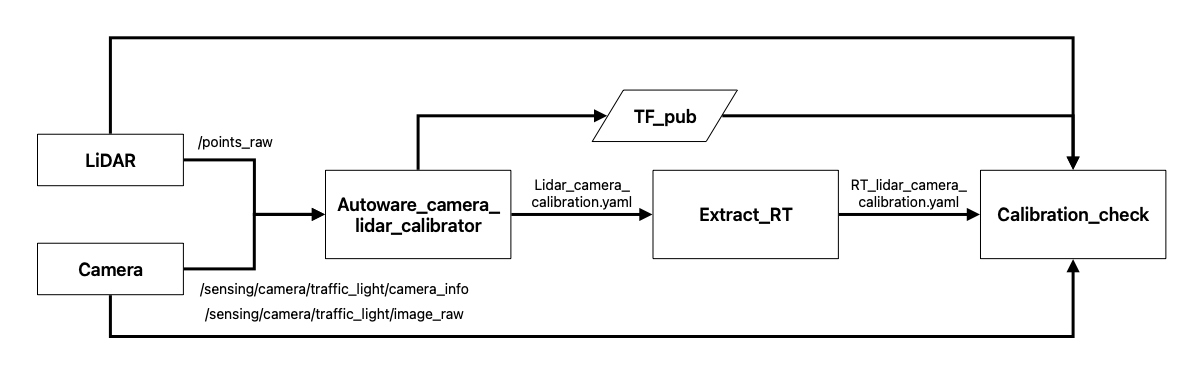
Autoware_camera_lidar_calibrator 실생
Calibration_tool 다운로드
해당 주소에서 다운로드 안 될 시 관리자에게 문의
readme.md 내의 OpenCV 설치 방법대로 수행
새 opencv를 설치할 경우 기존에 설치되어 있던 여러 의존성, 라이브러리가 삭제되거나 충돌할 수 있음
calibration_tool/src/autoware_camera_lidar_calibrator/launch/pubtf.launch 확인
<node pkg= "tf" type= "static_transform_publisher" name= "base_link2sensor" args= "0 0 0 0 0 0 sensor_kit_base_link velodyne_top_base_link 10" >
ars="0 0 0 0 0 0"는 x, y, z, roll, pitch, yaw 순이며 yaw 값이 매번 바뀌기 때문에 필수적으로 확인
calibration_tool/src/extract_RT/param 폴더 확인calibration package 실행
catkin_make # catkin_make error 발생 시 관련 package 찾아서 설치 # calibration 시작 전, "roslaunch sensor_launch sensor_cam_lidar.launch" 실행되어 있어야 함 bash calibrator_start.sh rviz
Calibration 파라미터 취득용 데이터 실행
rosbag play [file name]
LiDAR 데이터가 잘 보이는 지점에서 정지 후 7 번 과정 수행
카메라에 한 점을 클릭 후, rviz의 Publish Point 클릭 후 이미지에 대응 되는 LiDAR 점을 클릭 (참고: Fig.24 )
현재 이미지에서 보이는 대칭되는 모든 점 클릭
모든 rosbag 데이터를 차례대로 실행시키며 6, 7 번 과정 반복
LiDAR - Camera 포인트 쌍에 대한 log를 확인 (참고: Fig.25 )
9쌍 이상 찍혔을 때, error와 해당 데이터를 저장할 것인지 출력이 나옴
error가 4px 이상일 경우 : 프로그램을 종료 후 6 번 부터 다시 수행첫 9쌍 은 데이터가 적어 error가 약간 높게 나올 수 있으며, 10쌍부터 기존 값보다 error가 줄어들면 y를 눌러 데이터 저장
최소 60쌍 이상 취득
데이터는 calibration_tool/src/extract_RT/param/ 에 저장됨
calibration_tool/src/calibaration_check/param 폴더 생성Calibration 데이터 저장
bash extract_RT_start.sh
데이터는 calibration_tool/src/calibration_check/param에 저장됨
{kind=link}
{kind=link}