Calibration 검증용 데이터 취득
취득 장소

- 정지 상태 및 동적 객체가 없는 상태인 정적인 상황
- 다양한 거리에 정적 객체가 존재하여 LiDAR 데이터로 객체 구분이 용이한 환경
취득 방법
- LiDAR, Camera, Camera_info 총 3개의 데이터 취득
- 근 / 원거리까지 다양한 객체가 존재하는 장소를 2~3곳 정도 취득
- 2초간 취득 후,
ctrl + c를 통해 취득을 종료하면 xxxx-xx-xx-xx-xx-xx.bag 형태로 저장됨
rosbag record /points_raw /sensing/camera/traffic_light/camera_info /sensing/camera/traffic_light/image_raw
- 2초간 취득 후,
ctrl + c를 통해 취득을 종료하면 a.bag 형태로 저장됨
rosbag record -o a.bag /points_raw /sensing/camera/traffic_light/camera_info /sensing/camera/traffic_light/image_raw
Calibration Parameter 취득용 데이터
- 카메라로부터 Calibration 보드의 거리가 2.5, 3.5, 4.5m 거리에서 각각 나우어 취득
- 데이터 취득시 차량은 정지 상태 유지
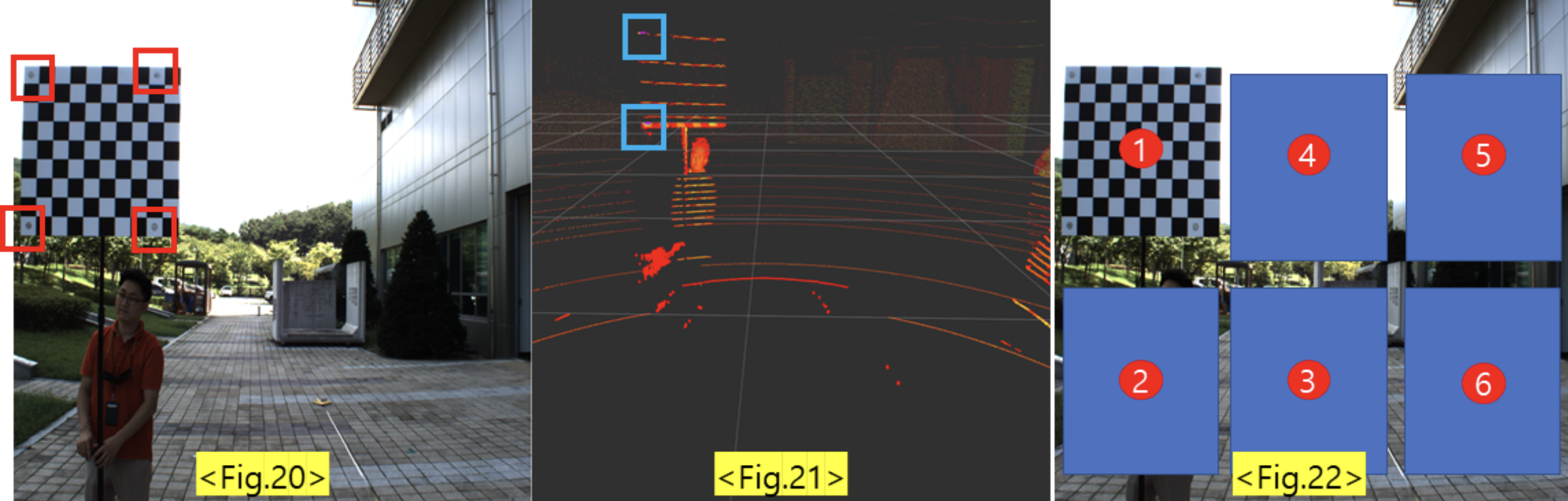
- <Fig.22>와 같이 거리 당 최소 6개의 시나리오 구성
- Camera view를 기준으로 양 끝이 오류가 많기 때문에 <Fig.22>에서 1, 2 사이, 5, 6 사이에 Calibration 보드가 위치하도록 추가적인 데이터 취득
- 한 씬에서 반사판이 최대한 많이 보이게 조절하여 촬영
- MKZ의 LiDAR는 해상도가 각도별로 다르기 때문에 <Fig.21>과 같이 반사판이 잘 보이게 조절하기 어려움
- 이 경우, 각 반사판에 대해 잘 보이는 경우를 나눠서 데이터 취득
- <Fig.21>의 경우 왼쪽 반사판만 보이기 때문에 각도를 조절해서 오른쪽 반사판의 데이터 추가적으로 취득
- 데이터 취득 명령어: 취득 방법
- 데이터 확인
roscore
rosbag play [file name]
- 데이터 검증: 센서 데이터 확인 및 문제 해결