센서 데이터 확인
- Camera와 LiDAR 센서 구동
roscore
cd sensor_ws
source devel/setup.bash
roslaunch sensor_launch sensor_cam_lidar.launch
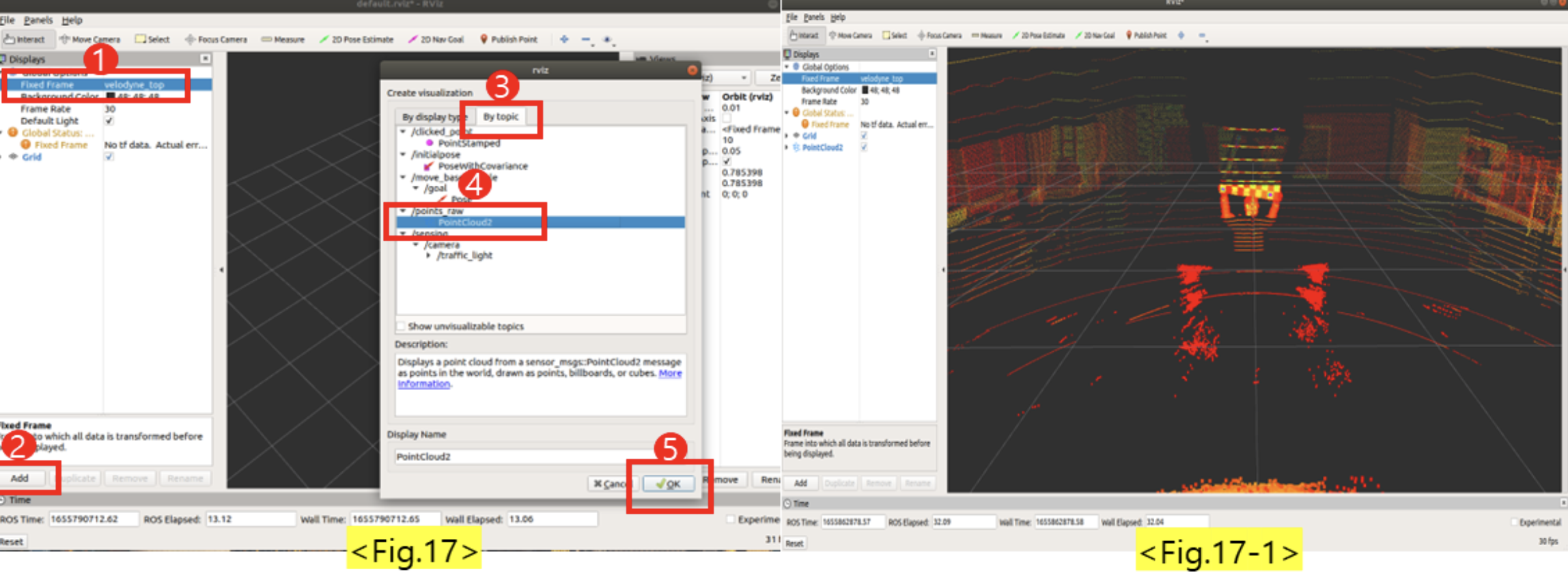
- LiDAR 데이터 정상 수신 확인
- Rviz를 켜고 visualization을 위해 <Fig.17>과 같이 설정
- <Fig.17>의 1번에
velodyne_top 입력
rviz
- 카메라 데이터 정상 수신 확인
- Rqt를 켜고
/sensing/camera/traffic_light/image_raw 확인
rqt_image_view
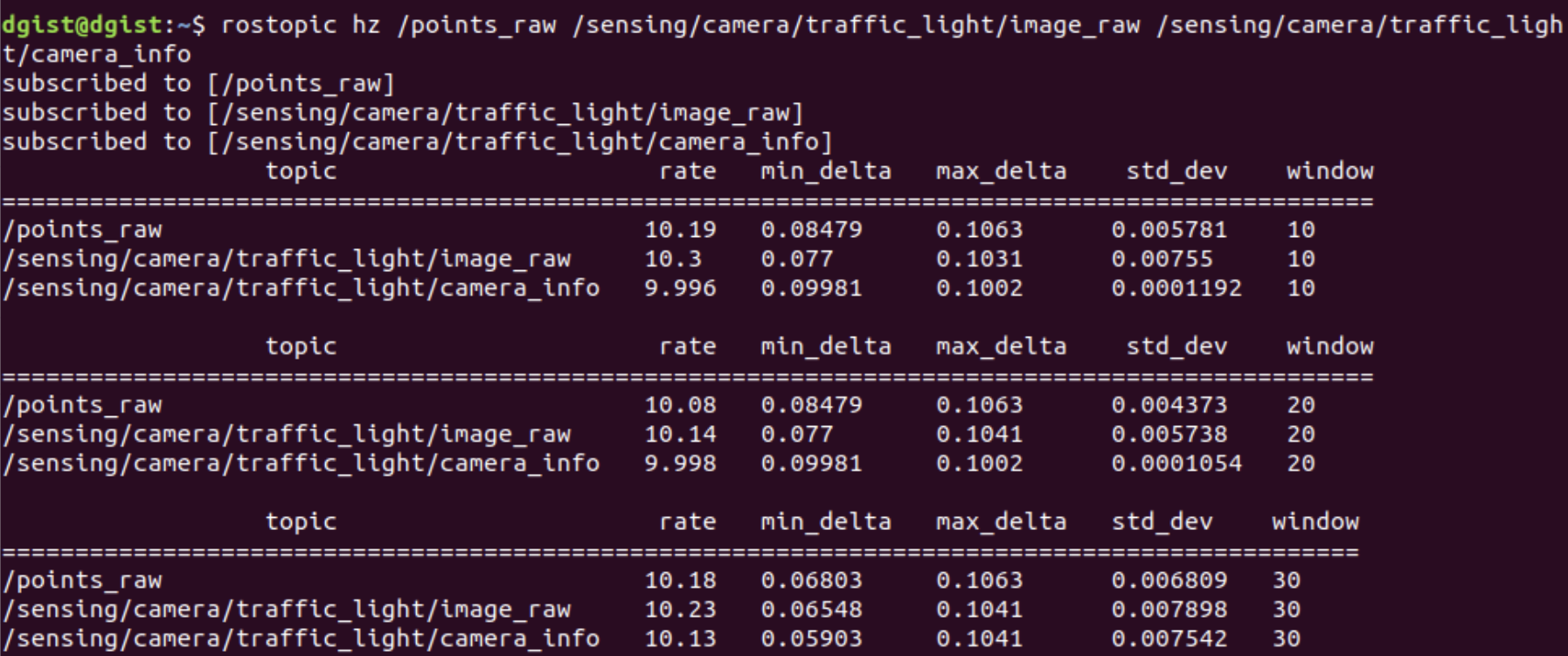
- 센서의 hz 확인
- 정상 수신 상태이면 rate가 10이 나와야 하며, 9.5 ~ 10.5정도 까지는 허용가능
rostopic hz /points_raw /sensing/camera/traffic_light/image_raw /sensing/camera/traffic_light/camera_info
문제 해결 ^doubleCheck
- Ubuntu setting의 Network 탭에서 Wired 연결 확인
- 컴퓨터와 연결 상태 확인 후 재부팅
카메라 데이터: 192.168.5.x
LiDAR 데이터: 192.168.3.x
- 다음 사항 확인 후 관리자에게 문의
- Camera, LiDAR 데이터 확인 후 센서의 이물질 있는지 확인
- 센서가 고정되어 있는지 확인
이거 새로운 노트로 만들기