Contents
역할
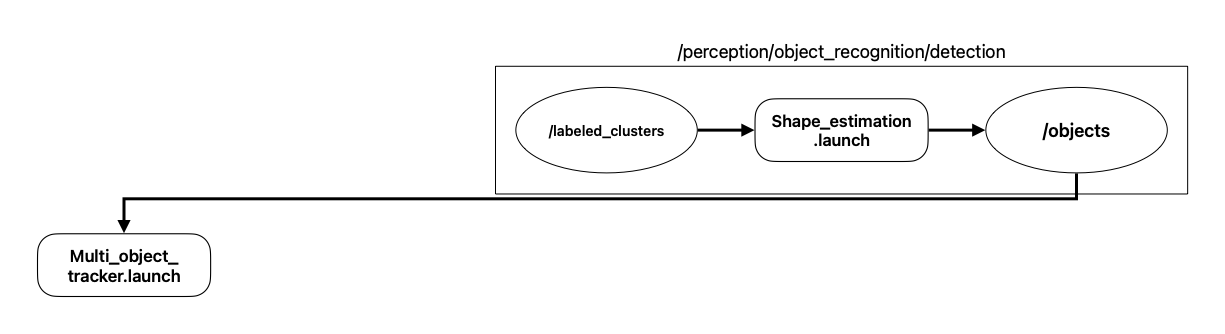
- segmentation된 labeled_clusters 토픽을 받아 bounding box를 만들어 detection 결과를 내는 부분
Architecture
변경 및 개선 사항
/corrector/yaw_fixed/bus_corrector.cpp
- 파라미터 변경
- Original
constexpr double min_length = 0.1; constexpr double max_length = 14.5; constexpr double min_width = 0.2; constexpr double max_width = 4.5; const double avg_length = 6.74; - Ours
const double min_width = 1.9; const double max_width = 3.15; const double min_length = 7.0; const double max_length = 17.0; const double avg_length = 7.0;
- Original
/corrector/yaw_fixed/car_corrector.cpp
- 파라미터 변경
- Original
const double min_width = 1.2; const double max_width = 2.2; const double min_length = 3.0; const double max_length = 5.0; - Ours
const double min_width = 1.2; const double max_width = 2.3; const double min_length = 3.0; const double max_length = 6.0;
- Original
/corrector/yaw_fixed/bike_corrector.cpp
/corrector/yaw_fixed/bike_corrector.hpp
- 이륜차 detect 이슈 해결을 위해 bike_corrector 추가
/filter/bus_filter.cpp
- 파라미터 변경
- Original
constexpr double min_width = 2.0; constexpr double max_width = 2.9; constexpr double min_length = 5.0; constexpr double max_length = 17.0; - Ours
constexpr double min_width = 1.9; constexpr double max_width = 3.15; constexpr double min_length = 7.0; constexpr double max_length = 17.0;
- Original
/filter/car_filter.cpp
- 파라미터 변경
- Original
constexpr double min_width = 1.2; constexpr double max_width = 2.2; constexpr double min_length = 3.0; constexpr double max_length = 5.0; - Ours
constexpr double min_width = 1.2; constexpr double max_width = 2.3; constexpr double min_length = 3.0; constexpr double max_length = 6.0;
- Original
/filter/bike_filter.cpp, /filter/bike_filter.hpp
- 이륜차 detect 이슈 해결을 위해 bike_filter 추가
/shape_estimator.cpp
- 이륜차 detect 이슈 해결을 위해 MOTORBIKE, BICYCLE에도 yaw_fixed::BoundingBoxModel 추가 적용
- Original
else if (type == autoware_perception_msgs::Semantic::MOTORBIKE) { model_ptr.reset(new normal::BoundingBoxModel); } else if (type == autoware_perception_msgs::Semantic::BICYCLE) { model_ptr.reset(new normal::BoundingBoxModel); } - Ours
else if (type == autoware_perception_msgs::Semantic::MOTORBIKE) { if (orientation_reliable_) { model_ptr.reset(new yaw_fixed::BoundingBoxModel(l_shape_fitting_search_angle_range_)); } else { model_ptr.reset(new normal::BoundingBoxModel); } } else if (type == autoware_perception_msgs::Semantic::BICYCLE) { if (orientation_reliable_) { model_ptr.reset(new yaw_fixed::BoundingBoxModel(l_shape_fitting_search_angle_range_)); } else { model_ptr.reset(new normal::BoundingBoxModel); } }
- Original
- 이륜차 detect 이슈 해결을 위해 MOTORBIKE, BICYCLE에도 filter 추가 적용
- Original
None - Ours
else if (type == autoware_perception_msgs::Semantic::MOTORBIKE){ filter_ptr.reset(new BikeFilter); } else if (type == autoware_perception_msgs::Semantic::BICYCLE){ filter_ptr.reset(new BikeFilter); else if (type == autoware_perception_msgs::Semantic::MOTORBIKE) { if (orientation_reliable_) corrector_ptr.reset(new yaw_fixed::BikeCorrector); else corrector_ptr.reset(new normal::BikeCorrector); } else if (type == autoware_perception_msgs::Semantic::BICYCLE) { if (orientation_reliable_) corrector_ptr.reset(new yaw_fixed::BikeCorrector); else corrector_ptr.reset(new normal::BikeCorrector);
- Original
/node.cpp
- NaN filtering 추가 적용
- Original
None - Ours Shape estimation msg에서 INF, NaN값 필터링 추가
- Original